













Россия
Россия
Россия
УДК 681.5 Автоматика. Теория, методы расчета и аппаратура систем автоматического управления и регулирования. Техническая кибернетика. Техника автоматизации
Традиционные подходы к управлению объектами железнодорожной инфраструктуры характеризуются фрагментарностью данных на различных этапах жизненного цикла. Информация, полученная в ходе изысканий и строительства, часто утрачивается к моменту перехода объекта в эксплуатацию, что снижает эффективность управления активами. В статье представлена интегрированная технология мониторинга, обеспечивающая формирование и бесшовное обновление информационной модели железнодорожного объекта на основе данных дистанционного зондирования с беспилотных летательных аппаратов (БПЛА). Представлены результаты апробации на экспериментальном участке железной дороги протяжённостью 750 м, подтверждающие метрологические характеристики предложенных методик: погрешность определения геометрических параметров менее 1% при соблюдении режимов съёмки. Практическая значимость работы заключается в переходе от эпизодических обследований к непрерывному цифровому мониторингу инфраструктуры, что соответствует концепции «умной железной дороги» и задачам Транспортной стратегии Российской Федерации.
информационное моделирование, жизненный цикл, железнодорожная инфраструктура, беспилотные летательные аппараты, фотограмметрия, цифровой двойник, строительный мониторинг, компьютерное зрение, предиктивное обслуживание, BIM
Введение
Современная железнодорожная инфраструктура представляет собой сложный пространственно-распределённый комплекс, эффективное управление которым требует непрерывного поступления актуальных данных о состоянии объектов на всех этапах жизненного цикла (ЖЦ) [1]. При этом согласно Транспортной стратегии Российской Федерации до 2030 года с прогнозом на период до 2035 года переход к цифровым технологиям управления инфраструктурой является приоритетным направлением развития отрасли1.
Однако существующая практика имеет недостаток, заключающийся в том, что данные, полученные на этапе изысканий и строительства с использованием традиционных геодезических методов, как правило, фрагментированы, не систематизированы и передаются на этап эксплуатации не в полном объеме [2,3]. Данный факт приводит к необходимости дублирования работ при проведении диагностики объектов, увеличению затрат на обследования, снижению точности планирования ремонтно-восстановительных мероприятий и, как следствие, к росту совокупной стоимости владения объектами.
В то же время в последние годы для сбора пространственной информации активно применяются беспилотные летательные аппараты (БПЛА), позволяющие оперативно получать материалы дистанционного зондирования сантиметрового и дециметрового разрешения [4-6]. Параллельно развиваются технологии информационного моделирования (BIM/TIM), формирующие основу для создания цифровых двойников объектов [7,8]. Исследования последних лет демонстрируют высокий потенциал интеграции данных с БПЛА и методов информационного моделирования для решения задач диагностики, контроля строительства и мониторинга состояния железнодорожной инфраструктуры [2, 4, 9].
Тем не менее, до настоящего времени отсутствует утверждённая комплексная технология, регламентирующая порядок сбора, обработки и интеграции данных с БПЛА в информационные модели на протяжении всего жизненного цикла железнодорожных объектов, а также требования к составу оборудования, параметрам съёмки и методам верификации получаемых результатов [2, 10].
Целью настоящего исследования является разработка и обоснование интегрированной технологии, обеспечивающей формирование и бесшовное обновление информационной модели железнодорожного объекта на этапах строительства и последующей эксплуатации с использованием данных дистанционного зондирования с БПЛА, а также создание методической и программной базы для её внедрения.
Методы и материалы
Научная концепция применения БПЛА для мониторинга строительных объектов железнодорожной инфраструктуры разработана авторским коллективом2 [3,9,13] и базируется на переходе от классической технологии BIM, предполагающей статическое ведение информационной модели, к динамической системе комплексного мониторинга, интегрирующей данные регулярной аэрофотосъёмки с БПЛА; gоказания автономных датчиков, установленных на конструкциях; результаты автоматизированной фотограмметрической обработки и обновляемую информационную модель объекта и прилегающих территорий [3,11].
Алгоритм (Рис. 1) отражает работы на всех этапах строительного контроля, включая планирование полётного задания, выполнение маршрутной съёмки, сбор данных с датчиков, фотограмметрическая обработка, формирование и верификацию информационной модели, анализ отклонений «факт-план», корректировку графика работ и формирование отчётной документации.
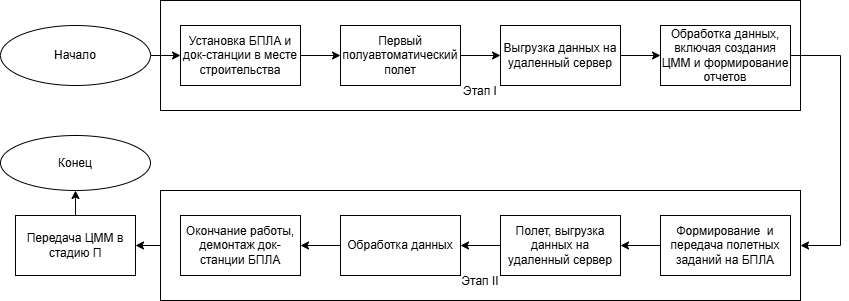
Рис.1. Алгоритм концепции концепция применения БПЛА
для мониторинга строительных объектов железнодорожной инфраструктуры
Для определения влияющих факторов на точность восстанавливаемых фотограмметрических моделей была проведена серия лабораторных и полевых экспериментов, детально описанных в предыдущих работах авторов [6, 12].
Для определения оптимальных условий съемки варьировались следующие параметры: угол поворота объекта между смежными снимками: 5°, 10°, 15°, 20°, 30°, значение апертуры (диафрагмы): от F2.8 до F11, показатель ISO.
С использованием БПЛА DJI Mavic 2 Pro с геодезическим оборудованием выполнена съёмка экспериментального участка железной дороги протяжённостью 750 м [6]. При этом сравнивались две методики: двугалсовая (традиционная): полёт по двум параллельным траекториям и одногалсовая (альтернативная): полёт по одной траектории.
На основе анализа нормативной документации (СП 119.13330.20173, СП 471.1325800.20194, ОДМ 218.9.017–20195) и результатов экспериментальных исследований [6] сформулированы требования к съёмочному оборудованию и режимам съёмки. Ключевым параметром, определяющим детальность получаемых данных, является размер пикселя на местности (Ground Sampling Distance – GSD).
Разработаны формы технического задания, включающие: требования к БПЛА (время полёта, радиус действия, масса, тип, рабочие температуры, скорость ветра), требования к съёмочному оборудованию (характеристики камеры, наличие GNSS-приёмника), параметры объекта (протяжённость, класс пути, тип местности), требования к выходной продукции (масштаб, система координат, сечение рельефа) [2].
В составе комплексной системы мониторинга предложено использование автономных датчиков давления, устанавливаемых непосредственно на конструкциях строящегося объекта. Авторским коллективом разработан и запатентован (патент на изобретение №2788310) автономный датчик давления, предназначенный для мониторинга динамических параметров напряжённо-деформированного состояния (НДС) железнодорожной инфраструктуры2.
Для автоматизации камеральной обработки разработано программное решение на языке Python, реализующее алгоритмы компьютерного зрения для выделения линейных объектов (железнодорожных путей) на аэрофотоснимках и ортофотопланах. Выбор классических методов (в отличие от нейросетевых) обусловлен требованием низкой вычислительной сложности, возможности работы на борту БПЛА и автономности от облачных сервисов.
Алгоритм обработки включает следующие этапы:
- Загрузка изображения и преобразование в градации серого (cv2.cvtColor).
- Гауссово размытие (cv2.GaussianBlur) для подавления шума.
- Адаптивная пороговая бинаризация (cv2.adaptiveThreshold) для сегментации изображения в условиях неравномерной освещённости.
- Морфологические операции: открытие (cv2.MORPH_OPEN) и закрытие (cv2.MORPH_CLOSE) с ядром 3×3 для удаления мелких шумов и заполнения пробелов.
- Обнаружение границ методом Кэнни (cv2.Canny).
- Выделение линий с помощью вероятностного преобразования Хафа (cv2.HoughLinesP).
Параметры преобразования Хафа (минимальная длина линии minLineLength, максимальный разрыв maxLineGap) настраиваются пользователем в зависимости от масштаба и качества исходного изображения. Результат отображается поверх исходного снимка с выделением обнаруженных линий зелёным цветом.
Графический интерфейс реализован на базе библиотеки Tkinter и включает поля ввода пути к изображению, параметров обработки, кнопки запуска и холст для отображения результата с полосами прокрутки [2].
На основе предложенных методов и средств разработана технологическая карта мониторинга строительства железнодорожной инфраструктуры с использованием БПЛА [11]. Карта описывает последовательность производственных процессов, распределение ответственности, состав оборудования, требования к входным и выходным данным.
Можно выделить следующие укрупнённые этапы. Подготовка полётного задания, включая определение границ съёмки, расчёт траектории, параметров перекрытия, высоты, настройка оборудования, оценка метеоусловий [2]. Маршрутная съёмка и сбор данных, заключаются в выполнении полёта по заданному маршруту, синхронизации снимков с данными GNSS, сборе показаний с автономных датчиков [11]. Камеральная обработка, включая первичную обработку, геопривязку, фотограмметрическое построение облака точек и ортофотоплана, классификацию данных, распознавание объектов с использованием разработанного ПО.
Итоговый этап включает формирование и обновление информационной модели, интегрируя обработанные данные [11].
Технологическая карта учитывает необходимость применения различных режимов съёмки на разных этапах жизненного цикла. Детальная двугалсовая съёмка для создания базовой модели на этапе строительства и оперативная одногалсовая съёмка для регулярного обновления модели в ходе эксплуатации.
Результаты
Анализ цифровых моделей, полученных при различных углах поворота объекта, показал, что искажения при определении длины и объёма составили менее 1% для всех моделей, что подтверждает высокую точность фотограмметрического метода при соблюдении требований к съёмке. При значении угла поворота 30° построение облака точек оказалось невозможным из-за недостаточного перекрытия и потери связующих точек. Зависимость точности восстановления от угла поворота носит нелинейный характер с критическим порогом в 20° [6, 12].
Таким образом, для круговой съёмки объектов рекомендуемый угол поворота между смежными снимками не должен превышать 20°, что соответствует обеспечению перекрытия не менее 60–70% в зависимости от конфигурации объекта.
Сравнение двух методик съёмки протяжённого участка железной дороги выявило, что двугалсовая съёмка обеспечивает более высокую точность восстановления модели, где средняя ошибка по трём осям составила 1,04 м при использовании стандартной обработки (Табл. 1). Одногалсовая съёмка характеризуется систематическими ошибками, особенно по высоте (ошибка по оси Z до 0,86 м в среднем), что связано с отсутствием бокового перекрытия и, соответственно, менее надёжной калибровкой модели в вертикальной плоскости. В то же время, одногалсовая методика позволяет существенно сократить время полёта (до 40%) и объём обрабатываемых данных, что делает её предпочтительной для задач оперативного обновления информационных моделей, когда предельная точность (особенно по высоте) не является критическим требованием.
Таблица 1
Ошибки фотограмметрической модели для двугалсовой съёмки
|
Название |
Общая ошибка |
Ошибка |
Ошибка |
Ошибка |
|---|---|---|---|---|
|
Точка 1 |
1,455 |
0,410 |
0,597 |
1,262 |
|
Точка 2 |
1,120 |
-0,339 |
-0,398 |
-0,990 |
|
Точка 3 |
0,537 |
-0,365 |
-0,197 |
-0,342 |
|
Среднее |
1,037 |
0,371 |
0,397 |
0,865 |
На основе проведённых исследований сформулированы требования к режимам съёмки [2, 6] (Табл. 2).
Таблица 2
Требования к аппаратуре и режимам съёмки
| Характеристика | Значения |
|---|---|
|
Для создания информационной модели (этап строительства, приёмка): |
|
| Режим | двугалсовый (две параллельные траектории) |
| Высота полёта | не более 100 м (для типовых БПЛА с разрешением сенсора 20 Мп) |
| Перекрытие | фронтальное ≥85%, боковое ≥75% |
| Угол наклона камеры | - 90° (надир) |
| Для оперативного обновления модели (этап эксплуатации, контроль): | |
| Режим | одногалсовый (одна траектория вдоль объекта) |
| Высота полёта | не более 125 м |
| Перекрытие | фронтальное ≥85% |
| Угол наклона камеры | -90° (надир) |
Программное решение для распознавания линейных объектов
Разработано два прототипа программного решения. Первый прототип реализует полуавтоматический режим: пользователь указывает точку на линейном объекте, после чего программа настраивает параметры и выполняет выделение непрерывной линии. Второй прототип работает в полностью автоматическом режиме с возможностью настройки параметров преобразования Хафа.
Интерфейс второго прототипа (Рис. 2) содержит поле для ввода пути к изображению и кнопку обзора; поля ввода параметров Min Line Length (по умолчанию 200) и Max Line Gap (по умолчанию 15); кнопку запуска обработки Detect Railways; область для отображения изображения с полосами прокрутки.
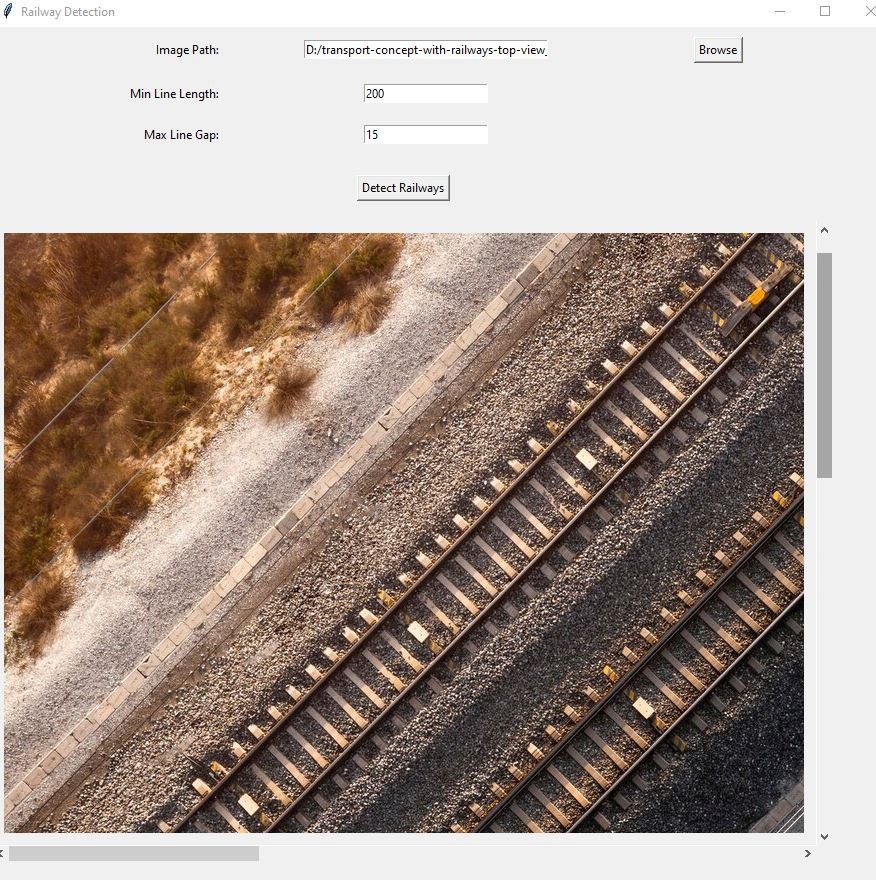
Рис. 2. Главное рабочее окно программы
В качестве примера обрабатываемого изображения выбран снимок участка железнодорожного пути. Исходное изображение представлено на Рис. 3.

Рис. 3. Исходное изображение для программной обработки
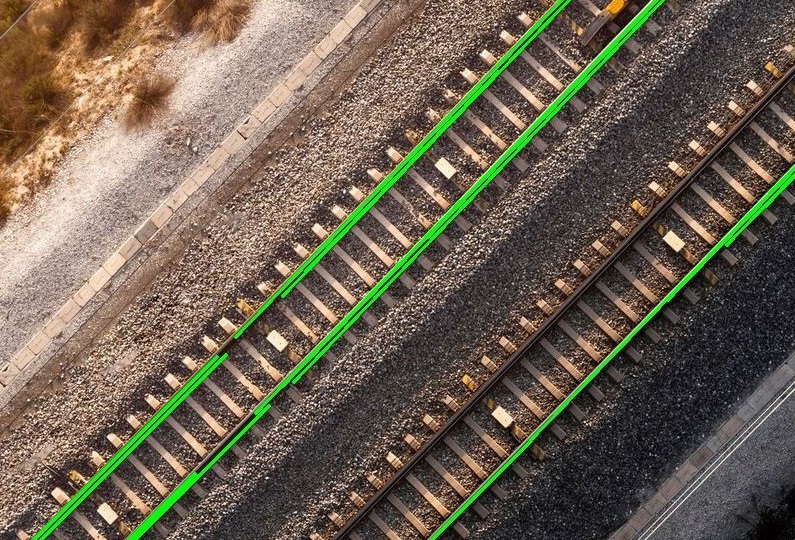
Рис. 4. Итоговое изображение с распознанным линейным объектом
После успешной загрузки изображения и указания требуемых параметров к распознаваемым линиям, для начала обработки снимка необходимо нажать кнопку «Detect Railways», после чего начнётся работа алгоритма по определению линейных объектов на изображении. Точность распознаваемых линейных объектов зависит от разрешения изображения. Результат обработки изображения представлен на Рис.4, где распознанные линейные объекты выделены зелёным цветом.
Качество распознавания зависит от разрешения исходного снимка, степени затенённости, наличия посторонних объектов. Эксперименты показали, что при использовании снимков с БПЛА с GSD не хуже 5 см/пикс достигается четкое выделение основных линейных элементов верхнего строения пути.
Сравнительный анализ эффективности разработанной технологии и традиционных методов мониторинга (Табл. 3) показывает преимущества предлагаемого подхода.
Таблица 3
Сравнение традиционных методов и технологии с применением БПЛА
|
Характеристика |
Традиционные методы |
Технология с БПЛА |
|---|---|---|
|
Себестоимость изысканий (на 1000 Га) |
40 млн руб. |
30 млн руб. |
|
Влияние на сроки строительства |
Увеличение до 10% |
Сокращение до 20% |
|
Объём строительных отходов |
Не влияет |
Сокращение до 10% |
|
Уровень автоматизации сбора данных |
Низкий |
Высокий |
|
Возможность сохранения модели |
Нет |
Да |
|
Скорость определения объёмов работ |
Низкая |
Высокая |
Разработанная технологическая карта представлена на Рис. 5. В отличие от существующих решений, карта охватывает не только этап строительства, но и предусматривает механизмы передачи данных в эксплуатацию. Ключевые особенности карты включают единое информационное пространство: все данные (облака точек, ортофотопланы, результаты распознавания, показания датчиков) консолидируются в информационной модели, доступной всем участникам процесса. Для первичного формирования модели применяется двугалсовая съёмка; для плановых осмотров (ежемесячных, сезонных) – одногалсовая; для внеплановых (после ЧС) – оперативная съёмка с возможностью применения LiDAR.
Выходные данные (актуализированная геометрия, зоны отклонений, карты дефектов, показания датчиков НДС) передаются в корпоративные информационные системы (ЕК АСУИ, АСУ-Инфраструктура, системы предиктивного обслуживания).
На выходе формируется не разовый отчёт, а постоянно обновляемая информационная модель, содержащая ретроспективу изменений и данные о состоянии конструкций за весь период наблюдений [7].
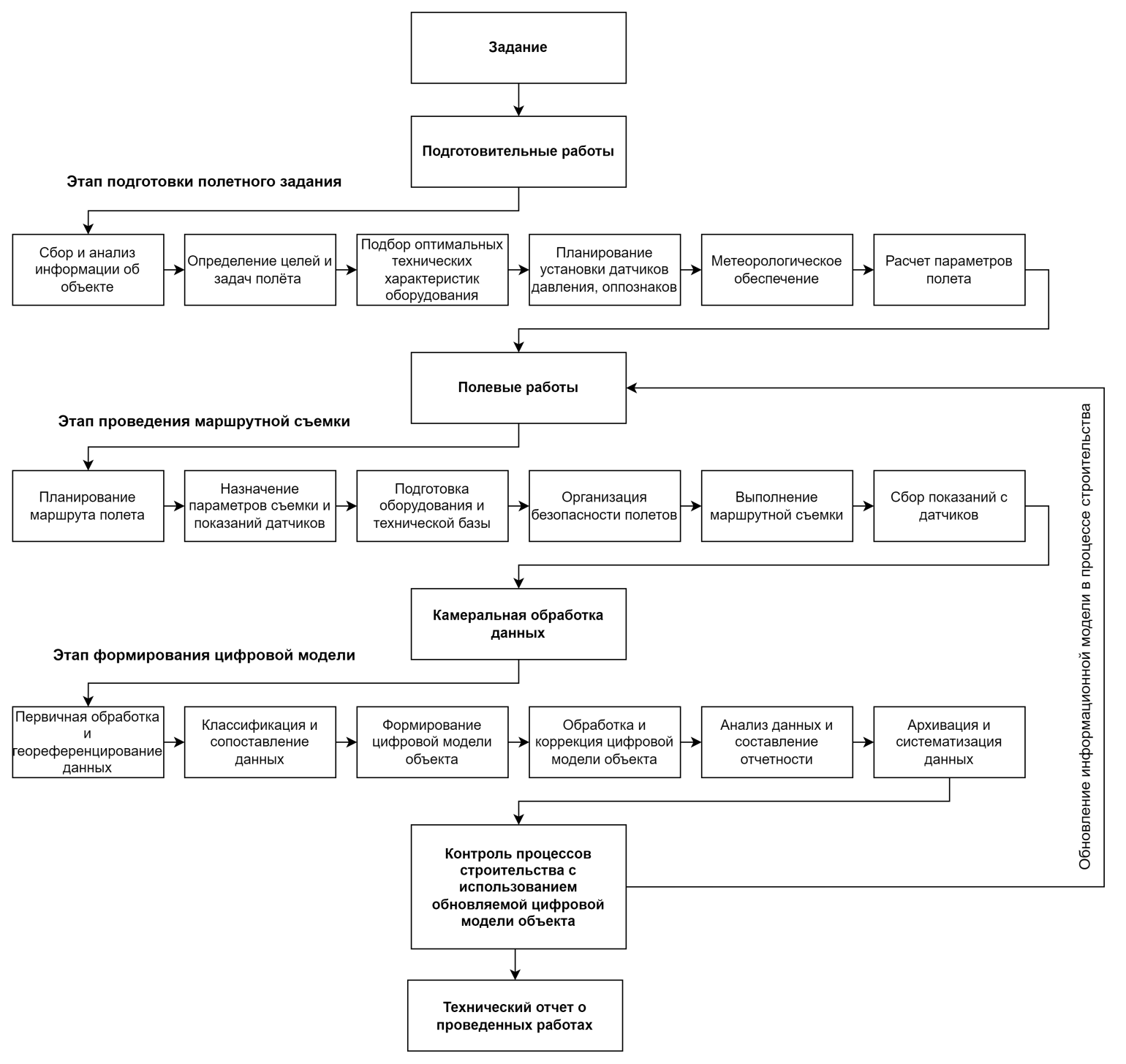
Рис. 5. Технологическая карта мониторинга
строительства железнодорожной инфраструктуры с использованием БПЛА
Обсуждение
Предложенная интегрированная технология мониторинга железнодорожной инфраструктуры на основе данных с БПЛА демонстрирует ряд существенных преимуществ по сравнению с традиционными подходами и существующими аналогами.
Обеспечивается бесшовность передачи данных между этапами жизненного цикла. Информационная модель, сформированная на этапе строительства с высокой детализацией (двугалсовая съёмка), содержит актуальную геометрию объекта в формате «как построено» (as-built). При передаче объекта в эксплуатацию эта модель становится базой для дальнейшего мониторинга: плановые облёты (одногалсовая съёмка) позволяют выявлять деформации, просадки, зарастание полосы отвода и другие изменения, сопоставляя текущее состояние с эталонным. Накопление ретроспективных данных создаёт основу для прогнозирования состояния конструкций и перехода к предиктивному обслуживанию, что соответствует современным тенденциям развития «умных железных дорог» [1, 4, 8].
Кроме того, интеграция двух каналов получения информации – оптического (аэрофотосъёмка) и телеметрического (автономные датчики НДС) – позволяет перейти от визуальной диагностики к инструментальному контролю напряжённо-деформированного состояния конструкций2 [ 9, 13].
Разработанное программное решение для распознавания линейных объектов решает актуальную задачу автоматизации камеральной обработки. В отличие от нейросетевых подходов, требующих больших размеченных выборок и значительных вычислительных ресурсов, предложенный алгоритм на основе классических методов компьютерного зрения (размытие, адаптивная пороговая обработка, морфологические операции, детектор Кэнни, преобразование Хафа) обладает низкой вычислительной сложностью и может быть реализован на бортовых компьютерах БПЛА , что особенно актуально для работы в условиях ограниченной связи с наземными центрами обработки данных. Перспективным направлением развития является комбинирование классических методов с машинным обучением для повышения точности распознавания в сложных условиях (затенение, частичное перекрытие объектами, сложные метеоусловия).
Ограничения предложенной технологии связаны, прежде всего, с нормативно-правовой базой. В настоящее время отсутствуют утверждённые отраслевые стандарты, регламентирующие применение данных с БПЛА для официальной приёмки объектов и ведения исполнительной документации. Требуется разработка соответствующих распорядительных и методических документов на уровне ОАО «РЖД» и Минтранса России. Второе ограничение – метрологическая аттестация методик фотограмметрической обработки для целей инструментального контроля. Несмотря на высокую относительную точность, абсолютные измерения требуют подтверждения в аккредитованных лабораториях. Третье ограничение – технические характеристики БПЛА (ограниченное время полёта, зависимость от погодных условий, требования к площадкам взлёта/посадки), что может затруднять регулярный мониторинг на удалённых объектах.
Направления дальнейших исследований включают вопросы совершенствования алгоритмов машинного обучения для автоматической классификации дефектов и повреждений на основе мультивременных ортофотопланов, а также интеграцию разработанной технологии с корпоративными системами управления активами (ЕК АСУИ, АСУ-Инфраструктура, системы управления надёжностью).
Перспективным направлением развития предложенной технологии является применение методов анализа временных рядов для обработки накапливаемых данных регулярных облётов. Накопление мультивременных данных о геометрических параметрах объектов и показаниях датчиков НДС создаёт основу для прогнозирования изменения состояния инфраструктуры. В этом контексте особый интерес представляют обобщённые экспоненциальные авторегрессионные модели, в частности, модель Озаки. В работах [14, 15] выполнено вычисление асимптотических ковариационных матриц для оценок параметров такой модели, полученных методами наименьших квадратов [14] и наименьших модулей [15]. Учитывая, что данные дистанционного зондирования могут содержать выбросы, связанные с погрешностями измерений или внешними помехами, применение робастного метода наименьших модулей [15] представляется особенно актуальным для построения устойчивых прогнозов деформационных процессов в конструкциях железнодорожного пути и искусственных сооружениях.
Заключение
В результате проведённого исследования разработана и апробирована интегрированная технология информационного моделирования на основе данных БПЛА, обеспечивающая управление жизненным циклом объектов железнодорожной инфраструктуры.
1 Распоряжение правительства Российской Федерации от 27 ноября 2021 года N 3363-р «О Транспортной стратегии Российской Федерации до 2030 года с прогнозом на период до 2035 года»
2 Евтушенко С.И., Адамцевич Л.А., Кучумов М.А., Железнов Е.М. АВТОНОМНЫЙ ДАТЧИК ДАВЛЕНИЯ. Патент на изобретение RU 2788310 C1, 17.01.2023. Заявка № 2022109764 от 12.04.2022.
3 СП 119.13330.2017 «СНиП 32-01-95* Железные дороги колеи 1520 мм»
4 Свод правил СП 471.1325800.2019 "Информационное моделирование в строительстве. Контроль качества производства строительных работ"
5 ОДМ 218.9.017–2019 Отраслевой дорожный методический документ, Методические рекомендации по производству аэрофототопографических работ с использованием беспилотных летательных аппаратов при изысканиях в целях строительства и реконструкции автомобильных дорог», Федеральное дорожное агентство (РОСАВТОДОР), Москва, 2021. С. 56.
1. Rakha T., Gorodetsky A. Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones // Automation in Construction. 2018. Volume 93. Pp. 252-264 DOI: https://doi.org/10.1016/j.autcon.2018.05.002; EDN: https://elibrary.ru/YICABN
2. Wang J., Wang L., Jia M., He Z., Lin Bi. Construction and optimization method of the open-pit mine DEM based on the oblique photogrammetry generated DSM // Measurement. 2020. Volume 152. 107322 DOI: https://doi.org/10.1016/j.measurement.2019.107322; EDN: https://elibrary.ru/RGBXXG
3. Адамцевич Л.А., Воробьев П.Ю., Железнов Е.М. Технология мониторинга объектов капитального строительства на этапах жизненного цикла методами дистанционного зондирования с использованием беспилотных летательных аппаратов (дронов) на основе высокоточной цифровой модели объекта // Строительство и архитектура. 2021. Т. 9. № 3. С. 51-55 DOI:https://doi.org/10.29039/2308-0191-2021-9-3-51-55 EDN: https://elibrary.ru/YSJZCM
4. Kiriiak N. Development and implementation of technical decision for digital support of constructionusing photogrammetry methods // Nuclear Engineering and Design. 2021. Volume 381. 111366 DOI:https://doi.org/10.1016/j.nucengdes.2021.111366 EDN: https://elibrary.ru/HKDIFP
5. Baltsavias E.P. A comparison between photogrammetry and laser scanning // Photogramm. RemoteSens. 1999. Volume 54, pp. 83-94 DOI: https://doi.org/10.1016/S0924-2716(99)00014-3
6. Железнов Е.М. Сравнение результатов фотограмметрической обработки данных, полученных различными сценариями аэрофотосъемки // Строительство - формирование среды жизнедеятельности. Cборник материалов семинара молодых учёных XXV Международной научной конференции. Москва, 2022. С. 85-90 EDN: https://elibrary.ru/GMNION
7. Arias P., Herráez J., Lorenzo H., Ordóñez C. Control of structural problems in cultural heritage monuments using close-range photogrammetry and computer methods // Computers and Structures. 2005. 83. Pp.1754–1766 DOI: https://doi.org/10.1016/j.compstruc.2005.02.018
8. Пархоменко Н.А., Ноак С.К. Использование беспилотных летательных аппаратов при проектировании линейных сооружений в труднодоступных районах // Электронный научно-методический журнал Омского ГАУ. 2022. № 2 (29). EDN: https://elibrary.ru/OIYTQC
9. Евтушенко С.И., Адамцевич Л.А., Кучумов М.А., Железнов Е.М. Определение динамических напряжений в строительных объектах железнодорожной инфраструктуры // Строительство и архитектура. 2022. Т. 10. № 1. С. 16-20 DOI:https://doi.org/10.29039/2308-0191-2021-10-1-16-20 EDN: https://elibrary.ru/BLTWFC
10. Щеглов М.А., Карелов А.И., Майоров А.А., Павловский А.А. Мониторинг объектов строительства железнодорожной инфраструктуры с применением данных с беспилотных авиационных систем // Известия вузов «Геодезия и аэрофотосъемка». 2023. Т. 67. № 5. С. 153–164. DOIhttps://doi.org/10.30533/GiA-2023-069. EDN: https://elibrary.ru/JZMDAD
11. Железнов Е.М. Разработка технологической карты для технологии контроля процессов строительства объектов железнодорожной инфраструктуры с использованием БПЛА // Сборник докладов научно-технической конференции по итогам научно- исследовательских работ студентов института цифровых технологий и моделирования в строительстве, г. Москва, 26 февраля – 1 марта 2024 года., С. 393-396.
12. Железнов Е.М., Воробьев П.Ю. Определение влияющих факторов на точность восстанавливаемой фотограмметрической модели // Строительство - формирование среды жизнедеятельности. Сборник материалов семинара молодых учёных XXIV Международной научной конференции. Москва, 2021. С. 141-148. EDN: https://elibrary.ru/EFXWGY
13. Железнов Е.М., Кучумов М.А. Проблема обследования строительных объектов железнодорожной инфраструктуры при динамических воздействиях // Дни студенческой науки. Сборник докладов научно-технической конференции по итогам научно-исследовательских работ студентов института цифровых технологий и моделирования в строительстве (ИЦТМС) НИУ МГСУ. Москва, 2022. С. 197-199. EDN: https://elibrary.ru/QCJZTS
14. Горяинов В.Б., Масягин М.М. Вычисление асимптотической ковариационной матрицы обобщенной экспоненциальной авторегрессионной модели Озаки для метода наименьших квадратов // Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия Естественные науки. 2024. № 3 (114). С. 24-44. EDN: https://elibrary.ru/PPICLB
15. Горяинов В.Б., Масягин М.М. Вычисление асимптотической ковариационной матрицы оценки наименьших модулей в обобщенной экспоненциальной авторегрессионной модели // Вестник Московского государственного технического университета им. Н.Э. Баумана. Серия Естественные науки. 2025. № 1 (118). С. 4-29. EDN: https://elibrary.ru/BEIMRT
